Embedded Systems Laboratory
Contact
In the Embedded Systems Laboratory we over the years build several devices, sensors for used in industrial
applications, some of them are commercial products. This includes Vibration analysis systems (sensors,
data acquisition units), hardware and software for an alternative fuel injection controller for automotive
applications and others. We are equipped to develop and prototype micro controller based systems/sensors and
the corresponding computer applications.
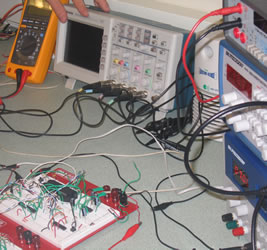
The Embedded Systems Laboratory is equipped to study different
mechatronics devices (two robots, two XYZ-tables, an industrial conveyor belt)
and has a fully equipped electronics workplace
(4 channel scope, function generator, two precision multi-meters,
a micro controller programmer, e.t.c).


Model Predictive
Control
The
objective in control is to determine inputs to a system such that the outputs
exhibit the desired behavior. In practice the input can not be chosen entirely
freely but has to satisfy constraints. Many different control strategies
have been developed to solve this problem including control strategies
for hybrid systems. In situations where optimal operation is at an extremum
of the constraint set or the process is nonlinear one single control strategy
can not satisfy all objectives over the entire runtime of the system and
it is difficult to handle constraints with some control strategies. To
overcome these problems we propose a control algorithm that combines several
different control strategies into one controller.
Hybrid Systems
In
engineering mathematics discontinuities appear in many equations. Based
on our theory for closed form solutions of differential equations with
piecewise coefficients or perturbation, we perform further research on
the theoretical and computational aspect of piecewise functions.